

图像标定全解析:历史、方法与计算原理
在计算机视觉、工业检测、无人驾驶等领域,图像标定(Camera Calibration)是获取高精度图像空间与物理空间对应关系的基础环节。本文将从历史发展、常用标定方法及其计算过程三个方面进行详细介绍。
一、图像标定的历史
图像标定的概念起源于计算机视觉早期对相机成像模型的研究。相机标定的目标是确定相机内部参数(Intrinsic Parameters)和外部参数(Extrinsic Parameters),以便将二维图像坐标与三维世界坐标建立映射关系。其发展历程大致如下:
- 20 世纪 80 年代
- 初期标定主要依赖手工测量和物理几何模型。
- Tsai(1987)提出了经典的两步标定法,将相机的内参和外参分开估计。
- 90 年代
- 张正友(Zhang Zhengyou, 1999)提出基于平面棋盘格的灵活标定方法,可通过多幅平面图像计算相机内参、畸变参数和外参,大大简化了标定流程。
- 该方法引入了线性初值 + 非线性优化,提高了精度和鲁棒性。
- 21 世纪
- 随着工业视觉和机器视觉的发展,标定方法不断优化,支持多相机系统、鱼眼相机、结构光等场景。
- 自动化、快速、无需人工干预的标定方法逐渐成为研究热点。
总结:图像标定从早期依赖物理测量逐步发展为利用标准图案(棋盘格、圆点阵列)和数学优化方法实现自动化和高精度。
二、图像标定的常用方法
根据标定对象和方法的不同,常用标定方法可分为以下几类:
1. 几何法(Direct Geometric Method)
基本思路:利用已知三维物理坐标和对应图像坐标,通过解析几何关系求解相机参数。
特点:适用于标定板位置固定、三维坐标已知的场景。
计算过程:
建立相机投影模型:
$$
s \begin{bmatrix}u \ v \ 1\end{bmatrix} = K [R|t] \begin{bmatrix}X \ Y \ Z \ 1\end{bmatrix}
$$
其中,K为内参矩阵,[R|t]为外参。将每个已知点对形成线性方程组。
用最小二乘法求解未知参数。
可选:使用非线性优化(如 Levenberg-Marquardt)进一步优化重投影误差。
2. 平面标定法(Planar Pattern Method)
代表方法:张正友标定法(Zhang, 1999)。
核心思想:利用平面棋盘格图像的多幅姿态,估计单应性矩阵,再解内参和畸变参数。
计算过程:
对每幅棋盘格图像,计算每个角点在图像上的像素坐标 `(u,v)。
假设世界平面
Z=0,建立平面到像素的单应性矩阵:
$$
s \begin{bmatrix}u \ v \ 1\end{bmatrix} = H \begin{bmatrix}X \ Y \ 1\end{bmatrix}
$$通过最少四个点解出每幅图像的 HHH。
利用多幅图像的 HHH 联立求解相机内参 KKK。
根据内参,进一步求解外参 R,tR, tR,t。
使用非线性优化最小化重投影误差,计算畸变参数:
径向畸变:
$$
u_d = u(1 + k_1 r^2 + k_2 r^4 + …)
$$切向畸变:
$$
u_d = u + [2p_1 uv + p_2(r^2 + 2u^2)]
$$
3. 自标定法(Self-Calibration)
- 基本思路:利用运动或场景约束,不需要标定板,通过图像特征匹配估计相机参数。
- 适用场景:SLAM、Structure-from-Motion(SfM)。
- 计算方法:
- 对多幅图像进行特征匹配(如 SIFT、ORB)。
- 根据本质矩阵
E或基础矩阵F解外参。 - 假设内参恒定,逐步优化(bundle adjustment)求出完整相机参数。
4. 标定板/圆点阵列法
- 与平面棋盘格类似,但用对称圆点阵列,提高亚像素定位精度。
- 对点中心检测后,解单应性或投影矩阵求相机参数。
三、图像标定的计算原理
1. 相机模型
常用的针孔相机模型:
$$
s \begin{bmatrix}u\v\1\end{bmatrix} = \begin{bmatrix}f_x & \gamma & c_x\ 0 & f_y & c_y\ 0 & 0 & 1\end{bmatrix} \begin{bmatrix}R & t\ 0 & 1\end{bmatrix} \begin{bmatrix}X\Y\Z\1\end{bmatrix}
$$
$$
K = \begin{bmatrix}f_x & \gamma & c_x\ 0 & f_y & c_y\ 0 & 0 & 1\end{bmatrix}
$$:内参矩阵
$$
f_x, f_y:焦距(像素单位)
$$$$
(c_x, c_y):主点坐标
$$$$
\gamma:像素非正交因子
$$
R, t:外参,描述相机姿态与位置
2. 标定求解步骤(以张正友法为例)
- 检测特征点:棋盘角点或圆点中心。
- 单应性求解:对每幅图像构建线性方程,求 HHH。
- 内参求解:利用多幅 HHH 联立求解 KKK。
- 外参求解:利用 HHH 与 KKK 解出 R,tR, tR,t。
- 畸变优化:通过非线性优化最小化重投影误差,估计径向与切向畸变参数。
非线性优化常用公式:
$$
\min \sum_i | \mathbf{x}_i - \hat{\mathbf{x}}_i(K, R, t, k_1, k_2, p_1, p_2) |^2
$$
四、总结
- 图像标定历史:从手工几何法 → 平面棋盘格标定 → 自动化、支持畸变和多相机。
- 常用方法:
- 几何法(解析或最小二乘)
- 平面棋盘格标定(Zhang方法)
- 圆点阵列、亚像素优化
- 自标定法(无标定板,依赖多图像匹配)
- 计算核心:
- 建立像素坐标与世界坐标映射
- 线性求解初值(单应性或投影矩阵)
- 非线性优化(最小化重投影误差)得到最终参数
标定完成后,可以将像素坐标精确转换为物理坐标,实现工业测量、三维重建和机器视觉的高精度应用。
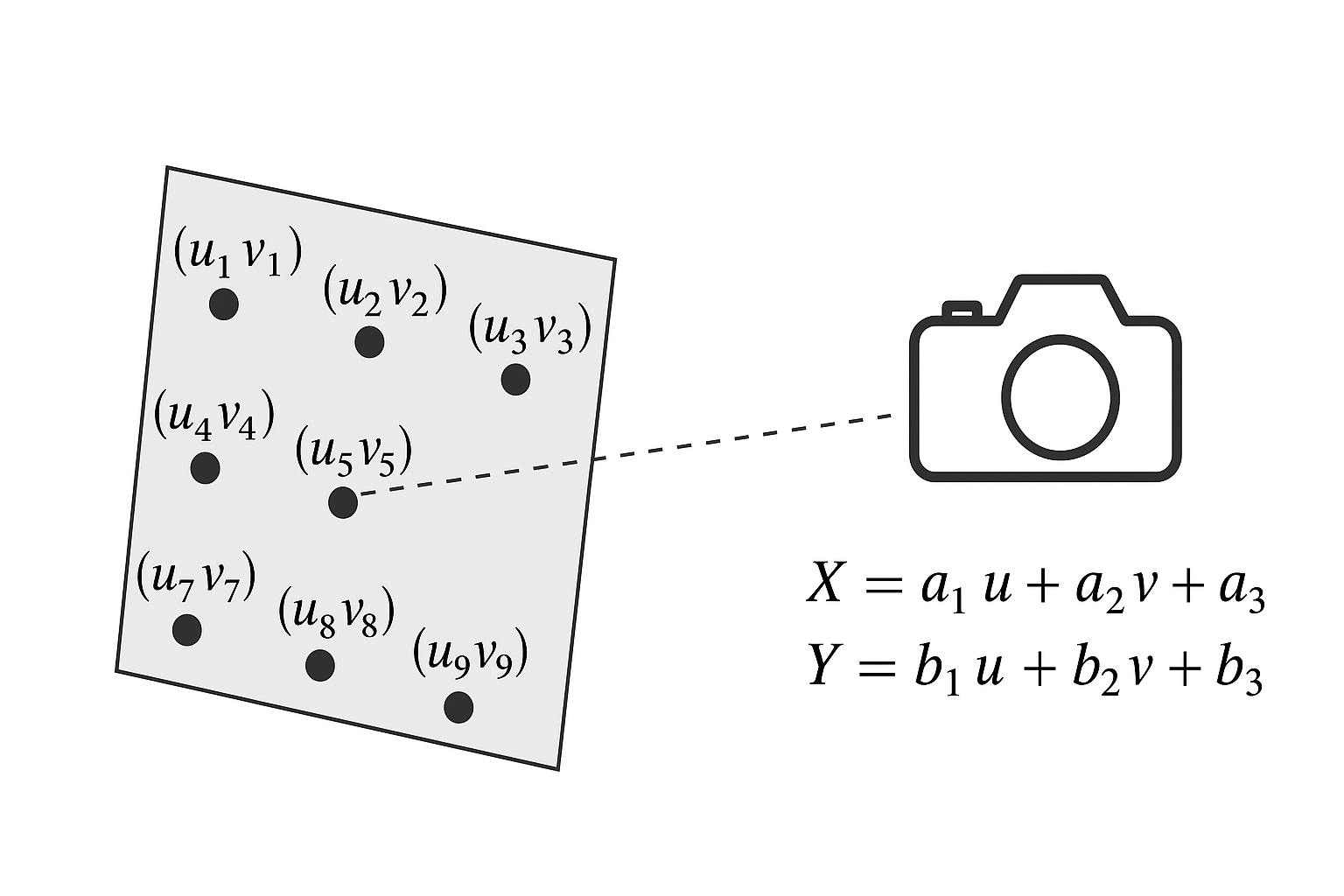
五、以九点标定法为例 -九点标定法(Nine-Point Calibration)详解
在工业视觉或机器视觉中,当目标场景是平面且相机畸变较小,可以用 九点标定法 通过少量已知点快速估计相机的标定矩阵(仿射或透视),用于将像素坐标转换为物理坐标。
一、基本原理
九点标定法通常假设:
相机成像满足针孔模型或近似仿射投影:
$$
\begin{bmatrix}X\Y\end{bmatrix} \approx \begin{bmatrix}a_1 & a_2 & a_3\ b_1 & b_2 & b_3\end{bmatrix} \begin{bmatrix}u\v\1\end{bmatrix}
$$(u,v):图像像素坐标(X,Y):对应机械坐标(实际物理坐标)a_1,a_2,a_3,b_1,b_2,b_3:待求仿射系数
如果考虑透视畸变,可用 3×3 单应性矩阵:
$$
s \begin{bmatrix}u\v\1\end{bmatrix} = \begin{bmatrix}h_{11} & h_{12} & h_{13}\ h_{21} & h_{22} & h_{23}\ h_{31} & h_{32} & 1\end{bmatrix} \begin{bmatrix}X\Y\1\end{bmatrix}
$$至少需要 3 个点解仿射矩阵,4 个点解透视矩阵,但九点标定提供更多点用于最小二乘优化,提高鲁棒性。
二、九点标定法的计算步骤(仿射模型)
步骤 1:收集像素与机械坐标
准备 9 个已知对应点
$$
(u_i,v_i) \leftrightarrow (X_i,Y_i)
$$
,一般分布在整个工作区域,保证标定精度。
步骤 2:建立线性方程组
仿射模型方程:
$$
\begin{cases} X_i = a_1 u_i + a_2 v_i + a_3 \ Y_i = b_1 u_i + b_2 v_i + b_3 \end{cases}
$$
可改写为矩阵形式:
$$
\underbrace{\begin{bmatrix} u_1 & v_1 & 1\ \vdots & \vdots & \vdots\ u_9 & v_9 & 1 \end{bmatrix}}_{9\times3} \begin{bmatrix}a_1\a_2\a_3\end{bmatrix} = \begin{bmatrix}X_1\\vdots\X_9\end{bmatrix}, \quad \begin{bmatrix} u_1 & v_1 & 1\ \vdots & \vdots & \vdots\ u_9 & v_9 & 1 \end{bmatrix} \begin{bmatrix}b_1\b_2\b_3\end{bmatrix} = \begin{bmatrix}Y_1\\vdots\Y_9\end{bmatrix}
$$
步骤 3:最小二乘求解
由于 9 个方程大于 3 个未知量,可以使用最小二乘法求解:
$$
\mathbf{a} = (U^T U)^{-1} U^T \mathbf{X}, \quad \mathbf{b} = (U^T U)^{-1} U^T \mathbf{Y}
$$
得到仿射系数 (a_1,a_2,a_3,b_1,b_2,b_3)
步骤 4:像素当量计算
计算单位像素对应的物理长度(mm/px):
$$
s_u = \sqrt{a_1^2 + b_1^2}, \quad s_v = \sqrt{a_2^2 + b_2^2}
$$
这给出了沿水平(u)和垂直(v)方向的标定比例。
步骤 5:坐标转换
任意像素点 (u,v)(u,v)(u,v) 可直接转换为机械坐标:
$$
3X = a_1 u + a_2 v + a_3, \quad Y = b_1 u + b_2 v + b_3
$$
三、九点标定法(透视模型)计算
当场景存在透视畸变时,需要用 单应性矩阵 H:
- 对每一点建立投影关系:
$$
s \begin{bmatrix}u_i\v_i\1\end{bmatrix} = \begin{bmatrix}h_{11} & h_{12} & h_{13}\ h_{21} & h_{22} & h_{23}\ h_{31} & h_{32} & 1\end{bmatrix} \begin{bmatrix}X_i\Y_i\1\end{bmatrix}
$$
- 展开成 2 个方程(X和Y):
$$
\begin{cases} h_{11} X_i + h_{12} Y_i + h_{13} - u_i(h_{31} X_i + h_{32} Y_i + 1) = 0\ h_{21} X_i + h_{22} Y_i + h_{23} - v_i(h_{31} X_i + h_{32} Y_i + 1) = 0 \end{cases}
$$
对 9 个点,形成 18×8 的线性方程组,用最小二乘法求解 h11,…,h32h_{11},\dots,h_{32}h11,…,h32,并固定
h_{33}=1透视变换:
$$
X = \frac{h_{11} u + h_{12} v + h_{13}}{h_{31} u + h_{32} v + 1}, \quad Y = \frac{h_{21} u + h_{22} v + h_{23}}{h_{31} u + h_{32} v + 1}
$$
- 局部像素当量可用雅可比矩阵计算:
$$
\frac{\partial X}{\partial u}, \frac{\partial X}{\partial v}, \frac{\partial Y}{\partial u}, \frac{\partial Y}{\partial v}
$$
四、九点标定法特点
- 优点:
- 少量点即可完成标定,适合小型工作区域或工业检测。
- 计算简单,可用 Excel 或 Matlab 实现。
- 局限:
- 精度受点位置影响,最好均匀覆盖工作区域。
- 仿射模型不适合大透视畸变场景,需要单应性或非线性优化。
五、小结
九点标定法是工业视觉中快速标定的一种经典方法:
- 仿射模型:适合小视场、畸变小,计算简便。
- 透视单应性模型:适合有透视畸变的平面场景,通过最小二乘求解 8 个未知数,可得到局部像素当量。
- 计算步骤核心:建立线性方程 → 最小二乘求解 → 坐标转换 → 像素当量计算。